
We’ve had a fabulous (but exhausting) weekend at PiWars. Once again massive thanks to Michael Horne and Tim Richardson for making it all happen.
We travelled down on Saturday, arriving about lunch time and headed straight in to check out the schools competition. Of course before we’d even arrived I’d seen pics on twitter of the various challenges, so no surprises when we got there. It was great to see such enthusiasm from all the participants and spectators, and to finally meet in the flesh so many people with whom I’ve been interacting on twitter for the last few months.
Angus and Erin both had a great time checking out the competitions (and the vendor stands), and Angus was itching to bring Glitterator in to show it off, but I convinced him to hold off until Sunday. I’m really glad that we went on Saturday, because as it turned out on Sunday we were so busy that we barely had a chance to see anyone else competing! Anyway, we met up with our Cambridge-based friend at the competition on Saturday, and after a good look around, went off for a relaxing drink by the Cam. Not a bad place for a pint!

Anyway, after a very restless night, with three of the four of us coughing regularly and waking each other up, it was off to the competition on Sunday morning. As our first challenge wasn’t scheduled until 11:40, we arrived well after the 9am door opening for competitors, and grabbed the last free corner in the team room. There weren’t many other competitors actually in there when we arrived, but we were happy to realise that on the table next to us was another regular at the Manchester Raspberry Jam, with her robot Frankenrobot. However we saw very little of each other, passing occasionally as we went from one challenge to the next. I was happy at the end of the day though to wander down to see the finals of the Pi Noon challenge and discover that she had made the quarter finals, and progressed through to the semi finals. Here’s her quarter final:
And what about our challenges? Well, our first was a Pi Noon heat, and unfortunately it didn’t go so well. It was looking good at first, with “first blood” (one balloon popped), but then things fell apart, starting with trim falling off, then a balloon needing adjustment, and ultimately the controls went dead.
Angus was extremely discouraged by this setback, and I tried to pep him up. We headed back to the team room, checked it out, and everything seemed fine. So we headed down for the artistic merit, technical merit and funniest robot judging. That complete, we quickly grabbed some lunch and headed for the next challenge: the obstacle course. Unfortunately while the controller had worked fine for showing off at the judging, when we got to the course, it was completely dead, and wouldn’t get the robot to move one bit. Thankfully we were told that we could return later if we fixed the problem, and have another try. So while Peter headed off to see if we could get the same allowance on the skittles (which also required remote control, and where we were due very shortly), Angus and I headed back to the team room to see if we could work out the problem.
It actually turned out to be quite simple: the batteries were flat. So I put it on the charger, and thanked heavens that the next challenges were autonomous ones: maze and line following. So while the controller charged, we headed off to attempt those ones. But there we encountered yet another problem: we had a dead motor. Aaaaargh! At this point, I was ready to give up, but not Angus. He headed back to the team room, completely stripped the robot and reassembled it with spare motors, which were not quite as powerful, but he reckoned would do the job. So then we headed down to try the straight line speed test, with fingers crossed. Our first run was looking good, until inexplicably just before the end it veered off and hit a wall, falling over. Thankfully our next two runs we clear… not exactly speedy, but reached the end without touching!
This was a big boost for all of us, so we rushed to have a go at all the remaining challenges, squeezing in between other competitors for ones we’d had to skip earlier. Everything went smoothly except for the line follower. We saw the line happily, but unfortunately I had forgotten to compensate for the less powerful motors in our code, so when we came to a corner, I slowed the motors down too far and it just stalled and didn’t move at all 😭. Oh well. In the end, we were very happy with our recovery, and managed to complete all of the challenges except for that one.
And the result? Well, we came second in the beginners’ section of the maze, with one clear run and one with just one touch. And overall we came 5th out of 15 beginners, so we were all pretty happy with that.

And even with 5th place, we received such an amazing bag of loot! Thank you too all the sponsors who contributed to this, and to everyone who helped inspire my kids to keep trying and do it all again next time.
Lessons learned
So at the end of it all, the question of course is: What did we learn?? Here are a few of ours:
- Spares. Lots of them. Assume things will fail!
- Charged batteries. And spare charged batteries. And if you have a controller that doesn’t have removable batteries, make sure it is fully charged! (We failed on that last point, but for our removable batteries had plenty of spares and made use of them. Other teams failed on this point, thinking they’d have time between challenges to recharge)
- We’d probably have been better off with point-to-point wireless (with a WAP on the robot). We found that wireless coverage there to be really laggy at times. I did spend a bit of time a few weeks ago looking at this, but put it in the too hard basket. I wish I hadn’t.
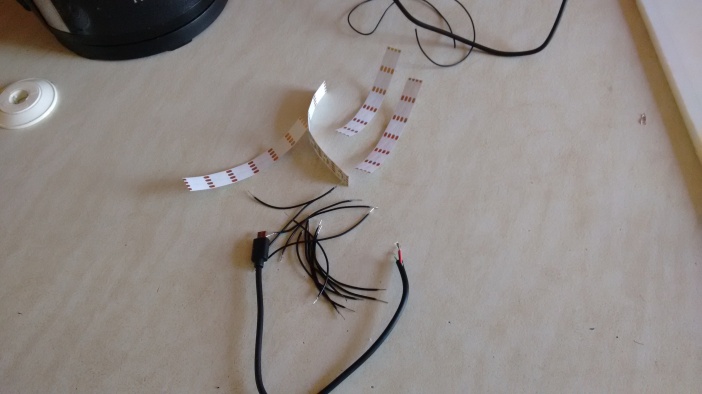
- Wiring/cables: Neatness isn’t just for looks. We thought at first that we’d burnt out one of the motors, but in retrospect I think in fact that it’s just that its cable has been damaged (although we haven’t done the testing to confirm this hypothesis yet). If it hadn’t been so long and occasionally trailing about, we wouldn’t have had this problem.
- Lego: Great for prototyping. Easily repairable (something we took advantage of on the day). But falls apart a bit too easily. We’ve got split feelings on this one. Half the team want to continue with Lego next time; I’d prefer something more reliable.
- And over the longer course of things: give yourself time. We worked pretty consistently on this since we found out about the competition (before we even knew if we would be selected for entry). By working this way, we were able to try out lots of different options and had a robot that could have a go at every challenge. Given more time (and money) we would have done better, but for a first go at building a robot, we were happy with what we achieved.
Anyway, it’s goodbye to Pi Wars to 2017, but we’ll be looking forward to the next challenges.



 Well, the combination of unreliable motors and limited sensors was driving me crazy with the maze. In retrospect, I’d add an accelerometer to the robot next time, so that I could be sure about position when turning. I’m using a simple left-hand rule for the maze, working on the principle that if the maze is simply connected (technical term that, meaning that all the walls are connected together or to the outer boundary), if you keep your left hand on a wall at all times, you can keep going and eventually you’ll get out the exit. Based on this, I can make do with just sensors on the left and front of the robot. But the “sticky-outy” bit in the middle of the maze was causing me grief, because it wasn’t so easy to determine when I’d cleared it, and the robot had a tendency to end up in the open(-ish) space in front of it going round and round in circles.
Well, the combination of unreliable motors and limited sensors was driving me crazy with the maze. In retrospect, I’d add an accelerometer to the robot next time, so that I could be sure about position when turning. I’m using a simple left-hand rule for the maze, working on the principle that if the maze is simply connected (technical term that, meaning that all the walls are connected together or to the outer boundary), if you keep your left hand on a wall at all times, you can keep going and eventually you’ll get out the exit. Based on this, I can make do with just sensors on the left and front of the robot. But the “sticky-outy” bit in the middle of the maze was causing me grief, because it wasn’t so easy to determine when I’d cleared it, and the robot had a tendency to end up in the open(-ish) space in front of it going round and round in circles.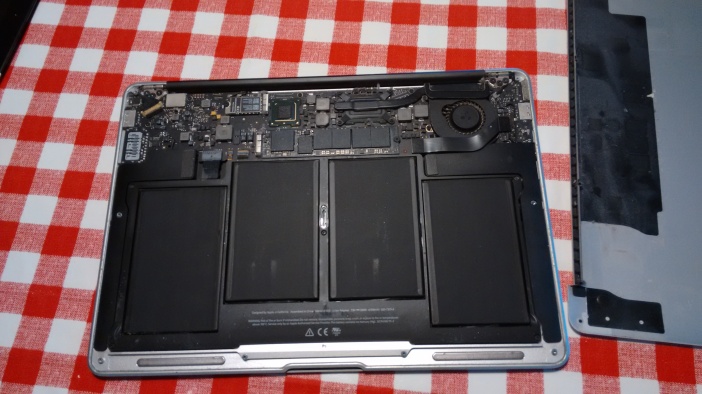 The vast majority (the four big slabs) is battery. Everything else is on that board at the top near the hinges. Anyway, after that diversion, it was back to Pi Wars work.
The vast majority (the four big slabs) is battery. Everything else is on that board at the top near the hinges. Anyway, after that diversion, it was back to Pi Wars work.




 took a break from Pi Wars in the afternoon, to attend the gpiozero tutorial run by Ben Nuttall, with Erin. She had a great time messing about with the traffic lights, enjoying learning how to make them go super-fast, and declaring “I’m having fun, but they’re learning!” as if that was a bad thing. (Of course she did learn quite a bit, but I don’t think she realises this 🙄 7 year olds!)
took a break from Pi Wars in the afternoon, to attend the gpiozero tutorial run by Ben Nuttall, with Erin. She had a great time messing about with the traffic lights, enjoying learning how to make them go super-fast, and declaring “I’m having fun, but they’re learning!” as if that was a bad thing. (Of course she did learn quite a bit, but I don’t think she realises this 🙄 7 year olds!)